



Онлайн
Alvaros
.
- Регистрация
- 14.05.16
- Сообщения
- 21.452
- Реакции
- 101
- Репутация
- 204

Перевод с сайта instructables.com, автор проекта:
You must be registered for see links
В данной статье я подробно расскажу процесс изготовления «умной перчатки» и её светодиодной панели, предназначенных для повышения безопасности велосипедистов и других людей, путешествующих по дорогам. Сначала можно посмотреть небольшую демонстрацию работы:
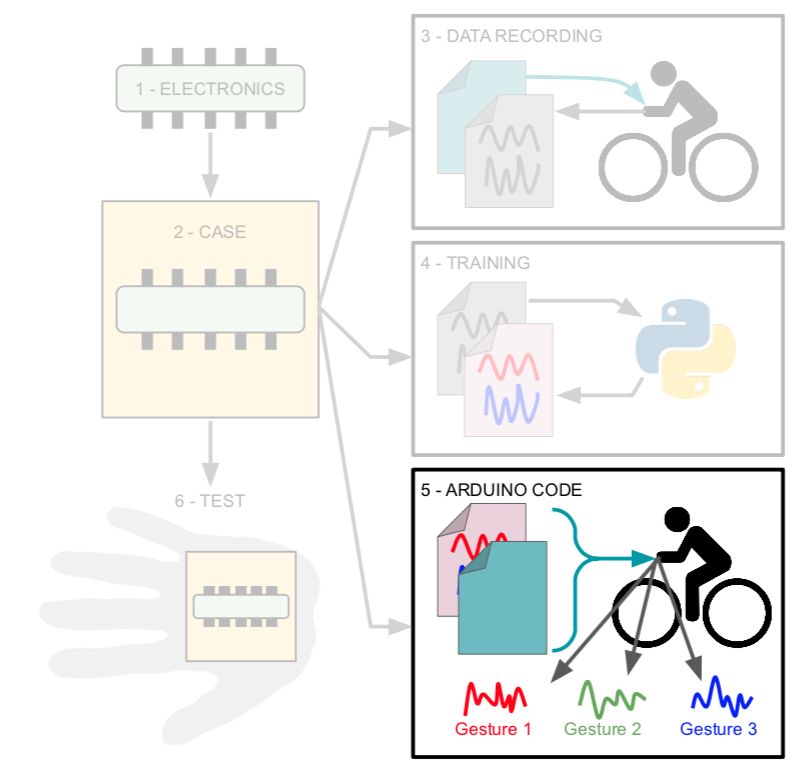
Как это работает
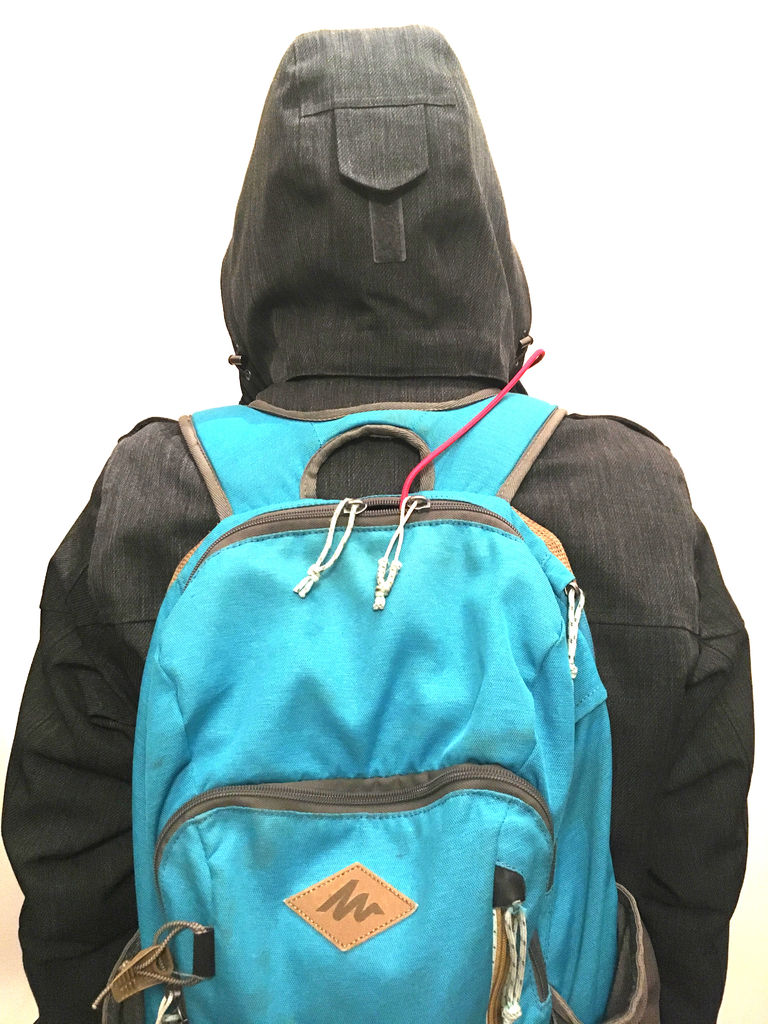
В перчатке находится плата Arduino, собирающая данные с гироскопа и акселерометра. Код использует модель «крохотного машинного обучения» tinyML и распознаёт жесты: каждое движение руки анализируется и превращается в сигнал (рука наклоняется влево, вправо, вперёд, назад, и т.п.). Сигнал отправляется по Bluetooth (BLE) на другой микроконтроллер, к которому подсоединена светодиодная матрица (которую, например, можно закрепить на рюкзак). Сообразно полученному сигналу матрица выводит определённые последовательности символов – так, чтобы другие водители и велосипедисты могли понимать, что собирается сделать велосипедист (к примеру, это могут быть стрелки влево, вправо, или текст).




Происхождение проекта
Во-первых, я езжу на велосипеде на работу, и провожу в седле более часа в день (проезжая порядка 22 км). Это всегда интересно, однако я живу в одном из самых густонаселённых городов Франции, где часто происходят происшествия с участием автомобилей и велосипедистов. Также Марсель – худший во Франции город для велосипедистов — там отчаянно
You must be registered for see links
. Поэтому данный проект посвящён как увеличению безопасности велосипедистов, так и попыткам обратить внимание городских властей на эту проблему.Во-вторых, этот проект поможет всем участникам движения пообщаться и лучше понимать друг друга. С моей точки зрения большая часть неприятностей, происходящих на дороге, связана с тем, что некоторые участники движения неправильно поняли других, что в результате привело к испугу, а потом к агрессии. Мне хочется, чтобы такое устройство помогло участникам движения лучше понимать друг друга. Стрелки показывают направление, а ещё можно выводить текст по буквам (однако я целиком и полностью выступаю за вежливые и конструктивные надписи, во избежание конфликтов).
Почему «умная перчатка»?
Я начал работу над проектом зимой, и холодная погода мотивировала меня на то, чтобы закрепить устройство на перчатке. Но я быстро понял, что идея была не очень хорошей, потому что в нашей местности летом довольно жарко. Поэтому я решил, что лучше всего будет поместить устройство в коробку и закрепить на руке. Но поскольку я не знал, как назвать его по-другому, я решил оставить слово «перчатка» в названии.
«Умная» происходит от техники машинного обучения, которую я использовал в данном проекте.
Вдохновение
Проект в основном является смесью двух других проектов. Я не начинал работу с нуля, а пользовался их наработками, которые потом развивал далее. Вот, чем я вдохновлялся при разработке:
—
You must be registered for see links
при помощи Arduino Nano 33 BLE SENSE.— не какой-то конкретный проект, а концепция использования светодиодных матриц для велосипедистов. Таких проектов полно – некоторые используют рюкзаки с интегрированными панелями, другие просто предлагают готовую матрицу, которую можно поместить куда угодно. В любом случае, эти светодиодные матрицы управляются при помощи пульта дистанционного управления, а не распознавания жестов.
Комплектующие
Для 3D-печати – 3D-принтер или доступ к таковому.
Электроника
- Arduino Nano 33 BLE SENSE;
- Ещё один МИ с BLE (Arduino Nano 33 BLE, Arduino 33 BLE SENSE, Arduino nano 33 IOT, ESP32, и т.д.). Я решил использовать плату на ESP32.
- Светодиодная полоска (WS2812B). Я использовал 160 светодиодов, чтобы получить матрицу 20×8;
- Четырёхуровневый буфер с 3 В до 5 В: 74AHCT125.
- Конденсатор на 1000 мкФ.
- Переключатели SPST, 3 шт.
- Макетная плата.
- Провода.
- Батарейка 9 В.
- Внешний аккумулятор.
Другое
- Винты и гайки М3.
- Застёжка-липучка.
Шаг 1: подготовка (МИ, код)


Прочитав
You must be registered for see links
про Arduino и машинное обучение, я решил тоже попробовать. Поскольку в последнее время появилось несколько новых плат Arduino Nano, я сделал сравнительную табличку, чтобы сделать наилучший выбор перед покупкой.
Все платы интересные, однако для распознавания жестов я мог использовать только одну — Arduino Nano 33 BLE SENSE. Лишь у неё есть нужные датчики и поддержка Tensorflow Lite. Ещё один интересный момент – на платах Arduino Nano 33 IOT, BLE и BLE SENSE есть собственный Bluetooth, поэтому любую из них можно использовать на светодиодной матрице для приёма BLE сигналов.
Загруженный в плату код основан на множестве различных программ для Arduino, найденных мною при разработке. Поэтому перед началом работы я решил проверить их с найденными мною примерами.
Поиграемся с BLE
В данном проекте связь по Bluetooth имеет решающее значение, поскольку именно так сигнал отправляется с датчиков на светодиодную матрицу. До этого я никогда не связывал две платы Arduino по BLE. Поэтому я практиковался со следующими примерами из
You must be registered for see links
:- Скетч LedControl, используемый с платой Arduino Nano 33 BLE Sense и кнопкой с притягивающим резистором, подсоединённым к контакту 2. Пример опрашивает BLE-периферию, пока не найдёт сервис с UUID 19b10000-e8f2-537e-4f6c-d104768a1214. После его обнаружения и установления соединения он будет удалённо управлять периферийным светодиодом BLE по нажатию кнопки.
- Скетч для светодиода и Arduino Nano 33 IoT.
К сожалению, со скетчем для светодиода у меня возникло множество проблем – 3 платы «сломались» при его загрузке. Понятия не имею, в чём там была проблема, но я решил заменить плату Arduino на другой МИ с BLE – плату ESP32. С новой платой я использовал следующее:
- Скетч BLE_write из библиотеки BLE ESP32 ARDUINO. Я добавил несколько изменений, чтобы она работала с платой Arduino Nano 33 BLE SENSE. На шаге 10 вы сможете сравнить скетч BLE_write и скетч Smartglove_BLE_LED-matrix, который я написал и загрузил.
Поиграемся со встроенными RGB светодиодами
Вы знали, что у платы Arduino Nano 33 BLE SENSE есть встроенные RGB светодиоды? В данном проекте они пригодятся для проверки правильной работы распознавания жестов. Мы должны проверять, что сигнал был отправлен на светодиодную матрицу – однако поскольку панель, скорее всего, находится на спине велосипедиста, ему будет трудно понять, что распознавание жестов сработало и сигнал был отправлен.
Тут не было ничего сложного, я просто немного подправил
You must be registered for see links
. Из кода видно, что красный светодиод находится на контакте 22, зелёный – на контакте 23, синий – на контакте 24. Входной сигнал LOW включает светодиод, HIGH – выключает.const int LED_BUILTIN_RED = 22;
const int LED_BUILTIN_GREEN = 23;
const int LED_BUILTIN_BLUE = 24;
// функция setup запускается один раз после включения или перезагрузки платы
void setup() {
// initialize digital pin LED_BUILTIN as an output.
pinMode(LED_BUILTIN_RED, OUTPUT);
pinMode(LED_BUILTIN_GREEN, OUTPUT);
pinMode(LED_BUILTIN_BLUE, OUTPUT);
}
// функция loop повторяется вечно
void loop() {
digitalWrite(LED_BUILTIN_RED, LOW); // включить LED (HIGH – уровень напряжения)
delay(1000); // подождать секунду
digitalWrite(LED_BUILTIN_RED, HIGH); // выключить LED, понизив напряжение до LOW
delay(1000); // подождать секунду
digitalWrite(LED_BUILTIN_GREEN, LOW); // включить LED (HIGH – уровень напряжения)
delay(1000); // подождать секунду
digitalWrite(LED_BUILTIN_GREEN, HIGH); // выключить LED, понизив напряжение до LOW
delay(1000); // подождать секунду
digitalWrite(LED_BUILTIN_BLUE, LOW); // включить LED (HIGH – уровень напряжения)
delay(1000); // подождать секунду
digitalWrite(LED_BUILTIN_BLUE, HIGH); // выключить LED, понизив напряжение до LOW
delay(1000); // подождать секунду
}
Поиграемся с распознаванием жестов и tinyML
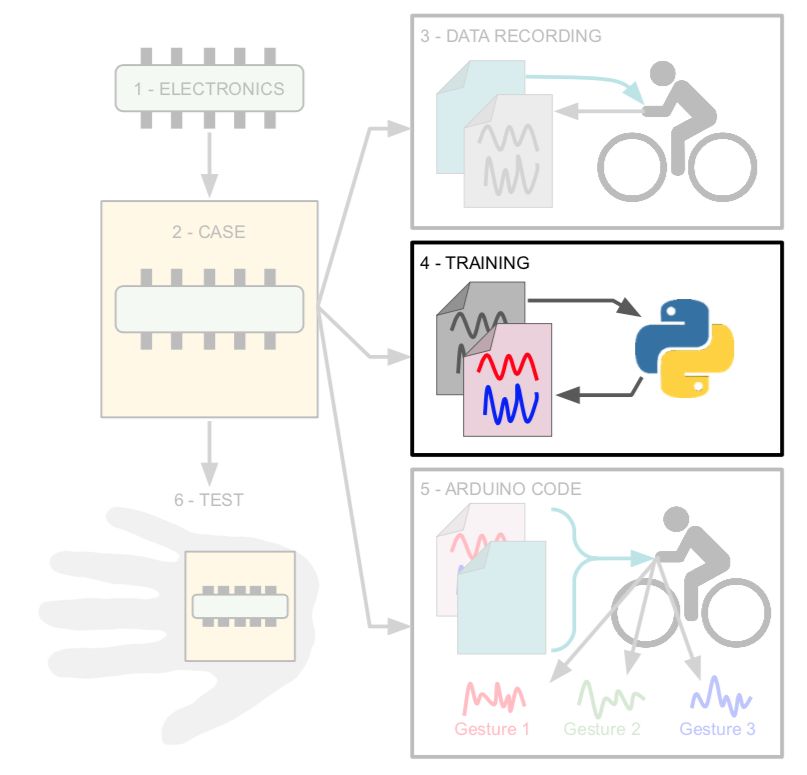
Наконец, я изучил руководство по использованию машинного обучения на Arduino, и попрактиковался с примером распознавания жестов. Пример делится на три основные части:
- Распознавание данных с программой
You must be registered for see links(и Arduino Nano 33 BLE sense);
- Обучение модели на записанных данных на
You must be registered for see links(на компьютере);
- Использование обученной модели на Arduino с
You must be registered for see linksдля распознавания образов (опять на плате Arduino).
Шаг 2: перчатка 1/6 (электроника)
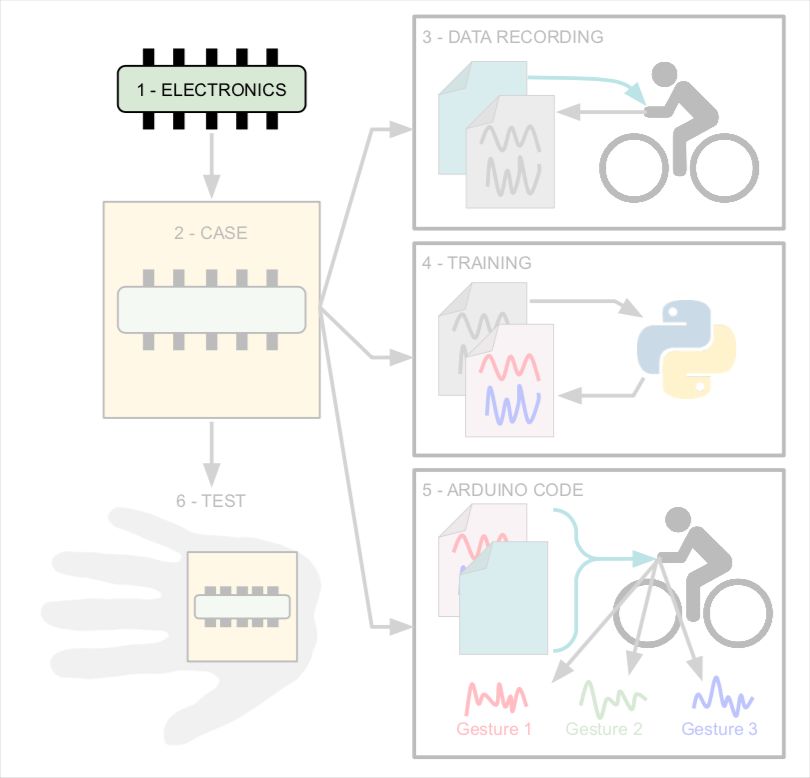

С шагов 2 по 7 я привожу одну и ту же схему, обозначая на ней шаги с тем, чтобы вам проще было понять процесс изготовления перчатки.
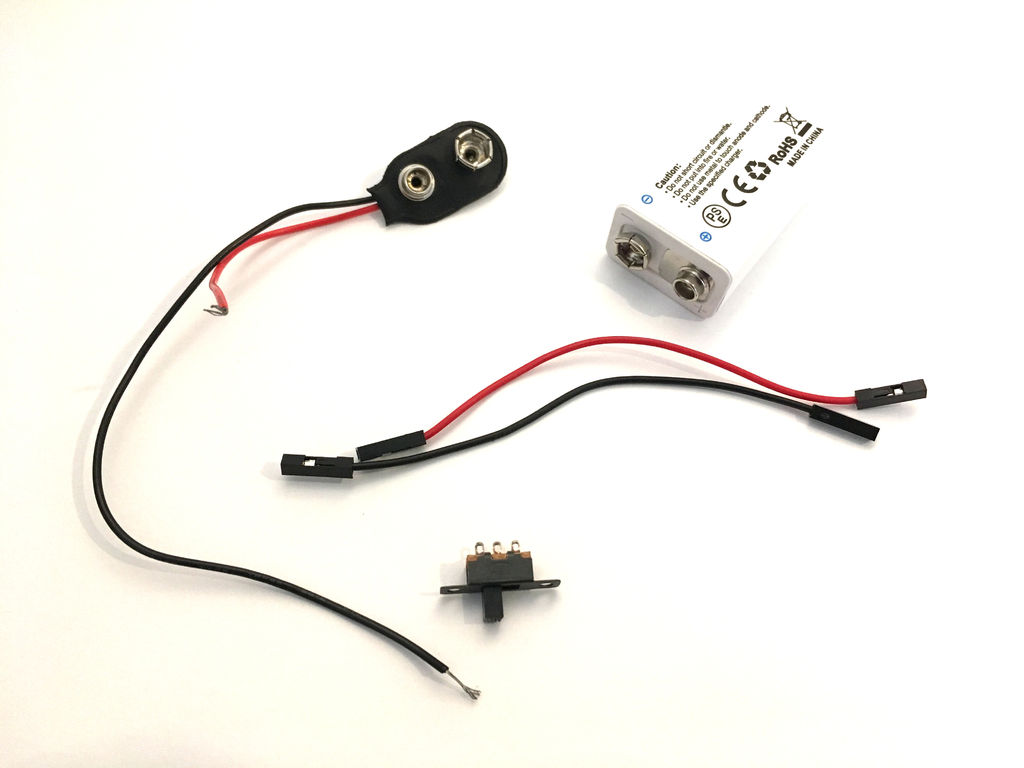
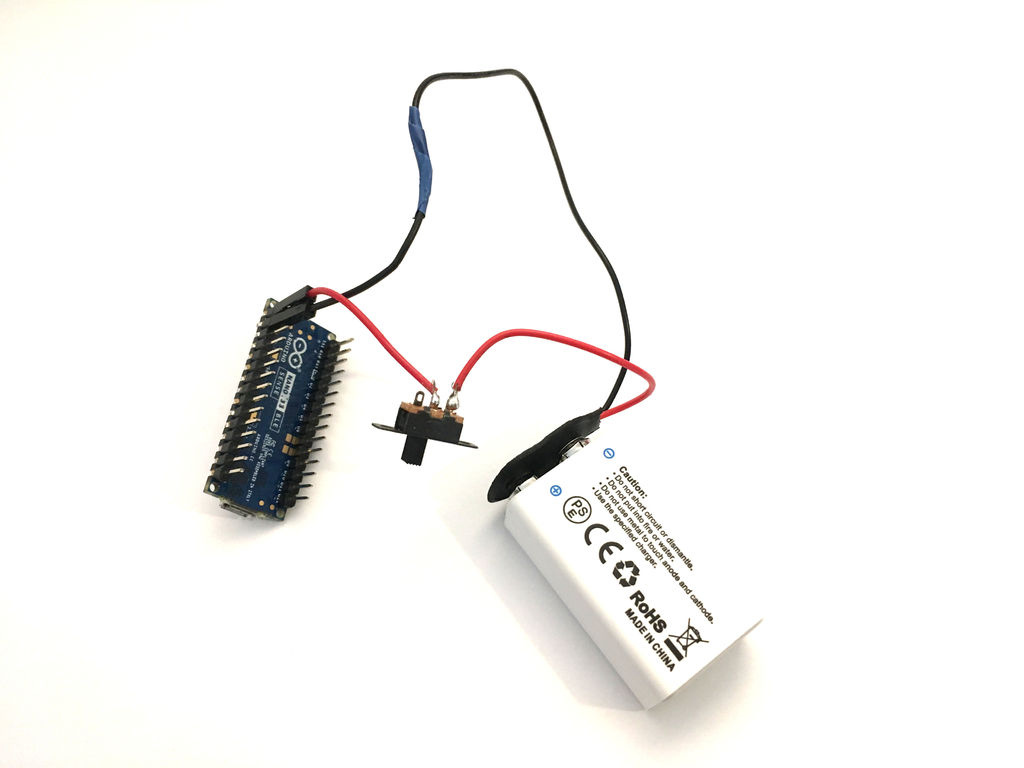
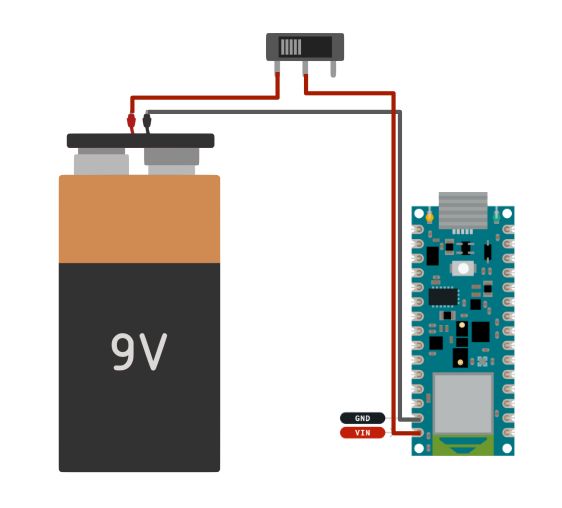
Схема электроники для перчатки очень простая:
- Плата Arduino.
- Батарейка на 9 В (я использую аккумулятор).
- Переключатель SPST.
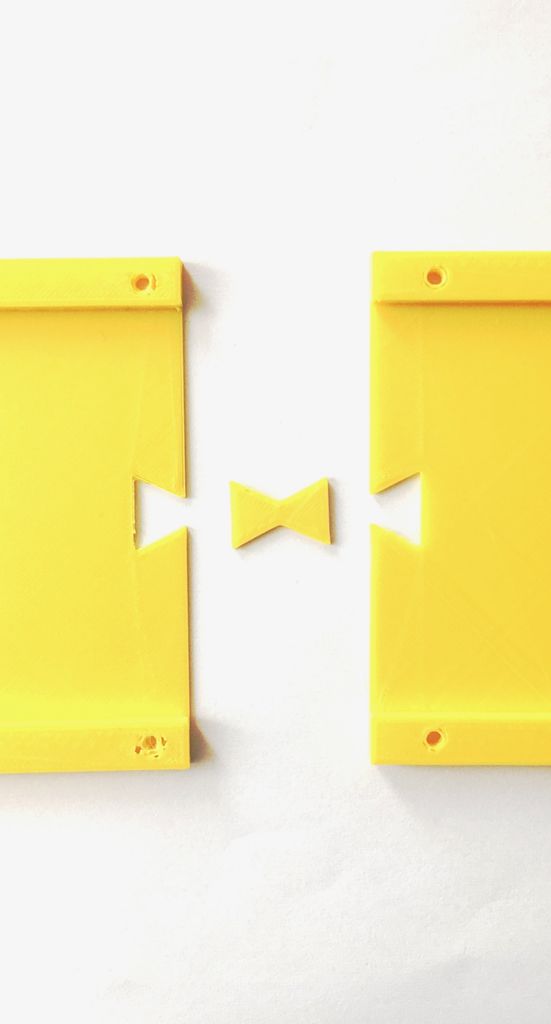
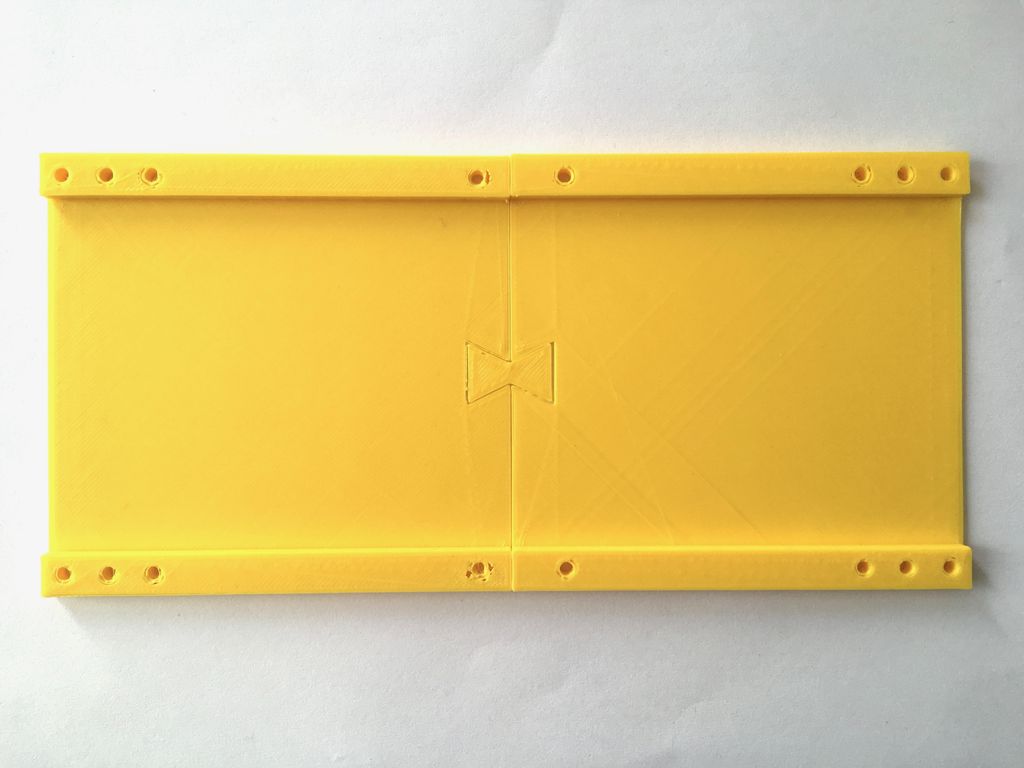
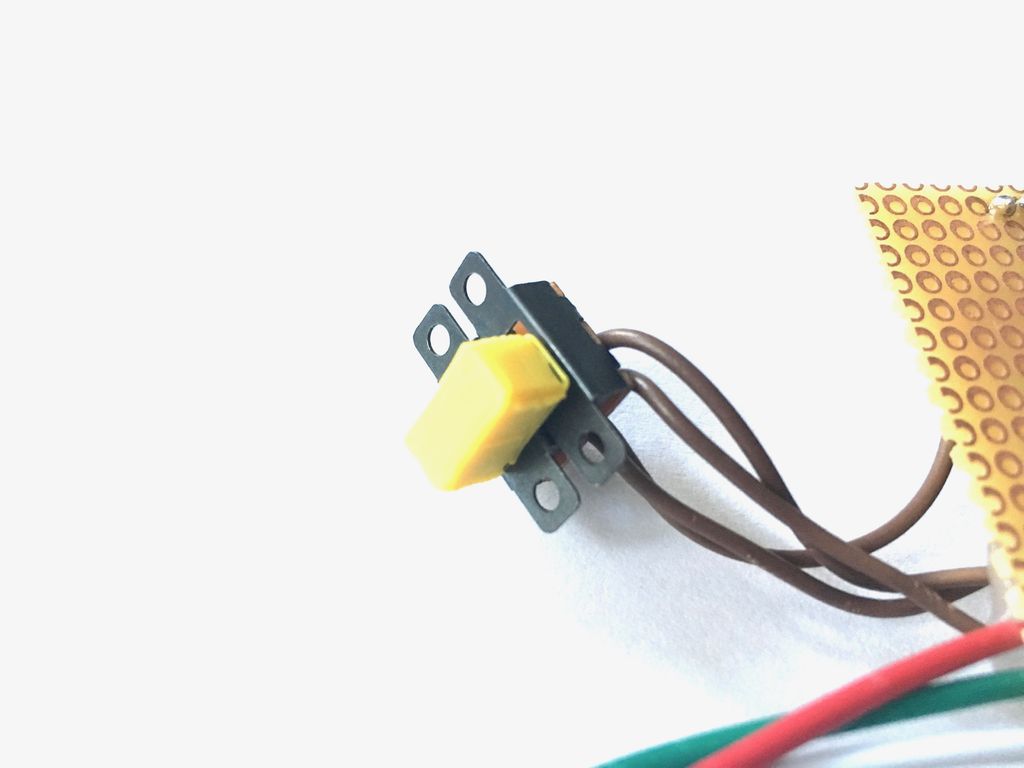
Шаг 3: перчатка 2/6 – корпус




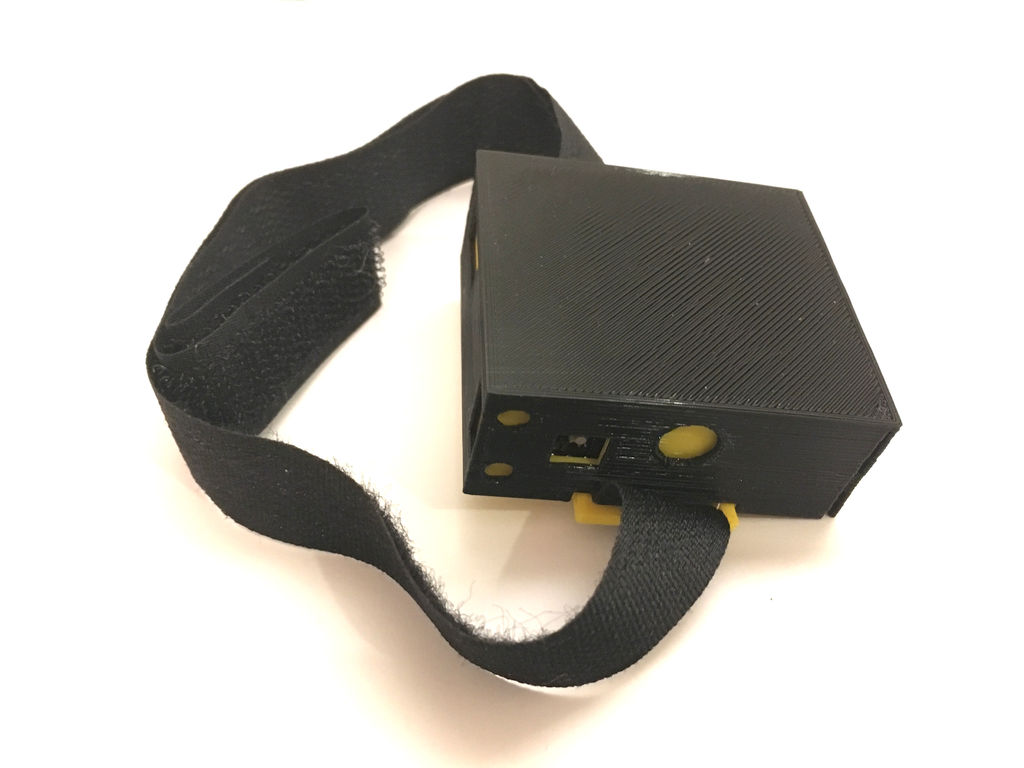





Корпус простой, и состоит всего из двух частей, распечатанных на 3D-принтере:
- В жёлтой части находится плата Arduino, аккумулятор и переключатель. Отверстия в корпусе позволяют перезаряжать батарею и перепрограммировать плату Arduino без необходимости разбирать корпус.
- Чёрная часть – это крышка, защищающая аккумулятор и плату.
На руку я креплю её полоской липучки.
Также я нарисовал логотип, который потом приклеил на крышку. Он обозначает велосипедиста, на которого смотрят сверху, и в нём есть три стрелочки – прямо, налево и направо. Четвёртая стрелочка отстоит от трёх остальных, потому что велосипеды не ездят назад.
Файлы
You must be registered for see links
You must be registered for see links
You must be registered for see links
Шаг 4: перчатка 3/6: запись данных






После сборки устройства приходит время записи данных. Цель – записать каждый жест многократно. Я установил порог для гироскопа, и когда он выходит за это значение, Arduino начинает выводить записанные данные на монитор.
Я записал следующие жесты:
- Рука указывает влево (стандартный жест велосипедистов, обозначающий поворот налево).
- Торможение (жест пальцами, тянущимися к рычагу тормоза).
- Рука наклоняется назад.
- Рука наклоняется вперёд.
- Рука наклоняется влево.
- Рука наклоняется вправо.
Естественно, вы можете записывать свои жесты.
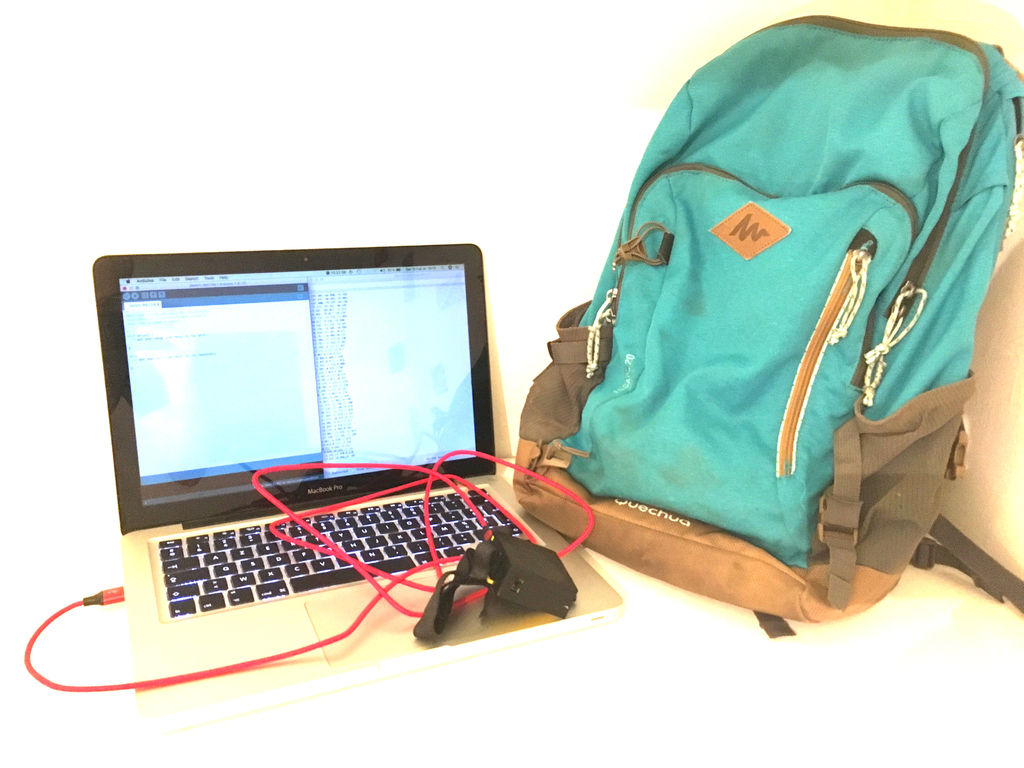
Для записи данных я написал программку, переключающую на светодиоде цвета после каждых 20 движений. Это помогало мне понимать, когда нужно переходить к другому жесту. Я подсоединил Arduino к компьютеру, открыл программу для отслеживания порта и положил ноутбук в рюкзак.
Записав все жесты, я перешёл к последнему этапу – скопировал данные, выведенные в программу, и сохранил их в формате csv.
You must be registered for see links
Шаг 5: перчатка 4/6: обучение

Для обучения я использовал
You must be registered for see links
, исправив в нём всего несколько строк. Перед обучением стоит проверить, что для каждого жеста у вас есть свой csv-файл, и данные в каждом файле относятся именно к этому жесту.На сайте Google Colab по ссылке в разделе «Upload data» загрузите свои данные.
В разделе «Graph Data (optional)» добавьте имя одного из файлов.
filename = «Arm_left.csv»
Затем исправьте эту строчку, чтобы выводить только данные с гироскопа:
#index = range(1, len(df['aX']) + 1)
index = range(1, len(df['gX']) + 1)
Закомментируйте следующие строки – данные акселерометра мы не используем:
#plt.plot(index, df['aX'], 'g.', label='x', linestyle='solid', marker=',')
#plt.plot(index, df['aY'], 'b.', label='y', linestyle='solid', marker=',')
#plt.plot(index, df['aZ'], 'r.', label='z', linestyle='solid', marker=',')
#plt.title(«Acceleration»)
#plt.xlabel(«Sample #»)
#plt.ylabel(«Acceleration (G)»)
#plt.legend()
#plt.show()
В разделе «Parse and prepare the data» добавьте все названия файлов:
#GESTURES = [«punch», «flex»,]
GESTURES = [«Arm_left», «Brake», «Hand_back-tilt», «Hand_front-tilt», «Hand_left-tilt», «Hand_right-tilt»]
Измените количество образцов на один жест, если меняли их в коде для Arduino:
#SAMPLES_PER_GESTURE = 119
SAMPLES_PER_GESTURE = 64
Осталось только закомментировать ускорение:
# normalize the input data, between 0 to 1:
# — acceleration is between: -4 to +4
# — gyroscope is between: -2000 to +2000
tensor += [
#(df['aX'][index] + 4) / 8,
#(df['aY'][index] + 4) / 8,
#(df['aZ'][index] + 4) / 8,
(df['gX'][index] + 2000) / 4000,
(df['gY'][index] + 2000) / 4000,
(df['gZ'][index] + 2000) / 4000
]
После прохода всей программы вы сможете скачать обученную модель.
Файлы
You must be registered for see links
You must be registered for see links
You must be registered for see links
You must be registered for see links
You must be registered for see links
You must be registered for see links
Шаг 6: перчатка 5/6: код для Arduino
Итоговый мой код для умной перчатки – это смесь следующих программ:
- пример «LED» из библиотеки «ArduinoBLE» (Peripheral>LED).
- «IMU_Classifier»
You must be registered for see links.
Подробно тут я распространяться о них не буду, просто рекомендую прочитать оригинальные программы, чтобы лучше понимать происходящее.
Добавьте свою модель в код, и её можно будет испытывать!
Файлы
You must be registered for see links
You must be registered for see links
Шаг 7: перчатка 6/6: испытания




Как видно из видеоролика, светодиод загорается по-разному в зависимости от распознанного жеста:
Шаг 8: светодиодная матрица 1/4: электроника



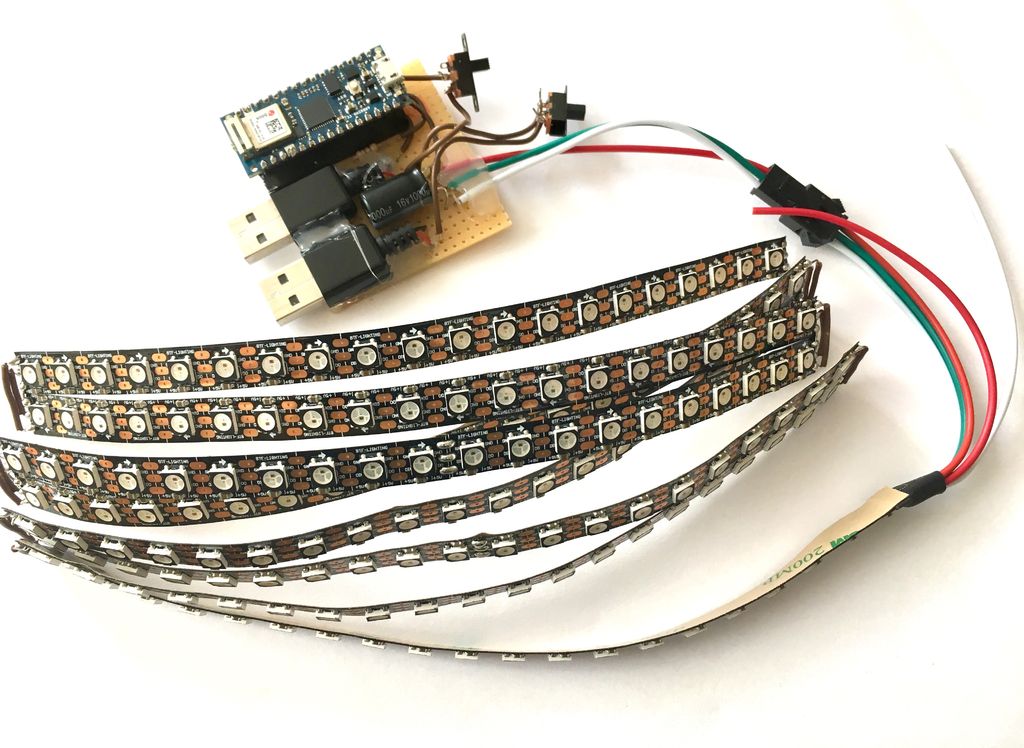
Как я уже упоминал, при закачке скетча из библиотеки ArduinoBLE для светодиода на Arduino Nano 33 BLE SENSE я столкнулся с некоторыми проблемами. Поэтому я решил вместо этой платы использовать ESP32. Поэтому на приведённых фотографиях вы можете увидеть обе платы.
Поскольку обе платы, Arduino Nano 33 BLE SENSE и ESP32, работают с логикой на 3,3 В, я добавил четырёхуровневый буфер с 3 В до 5 В (74AHCT125), как рекомендуется в
You must be registered for see links
.Также я добавил конденсатор на 100 мкФ для защиты светодиода от резких перепадов напряжения.
Всю схему я собрал на макетной плате.
Видно, что я задействовал оба разъёма внешнего источника питания, поскольку испугался, что светодиодной матрице потребуется слишком большой ток. Поэтому матрица и МИ питаются от разных разъёмов внешнего источника питания.
Шаг 9: светодиодная матрица 2/4: корпус



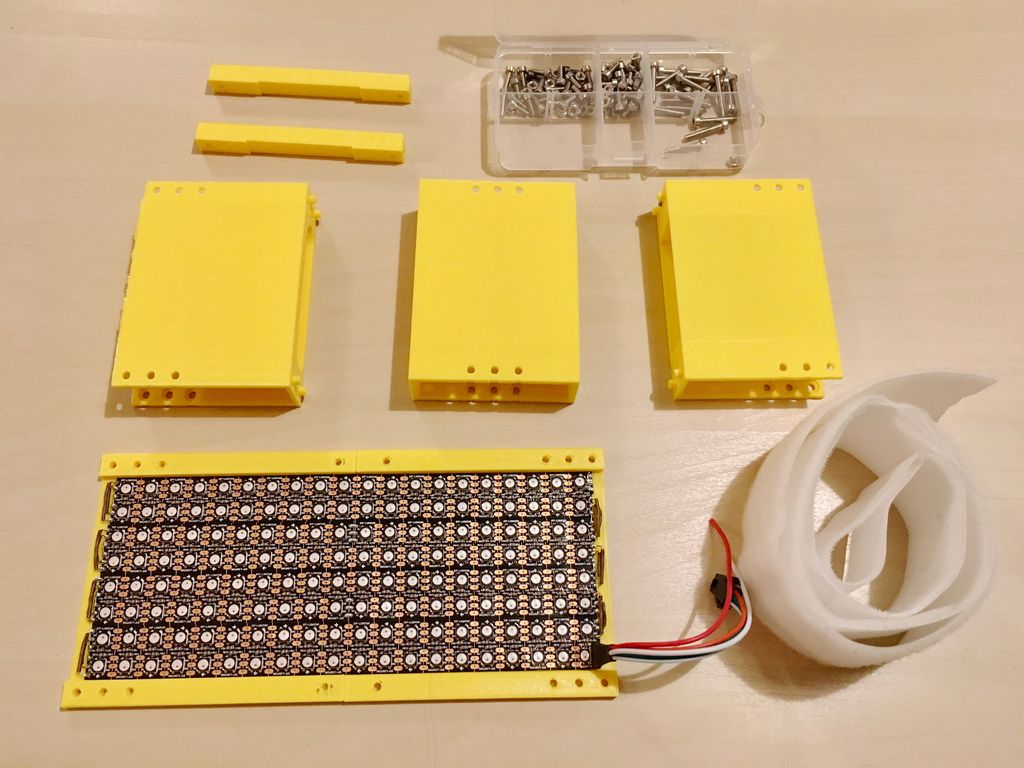






Мне нужен был сборный корпус для светодиодной матрицы. Поэтому он состоит из нескольких частей (а ещё потому, что мой 3D-принтер очень крохотный), и я предусмотрел в них отверстия для болтов.
Для подсоединения панели я снова воспользовался липучкой.
Файлы
You must be registered for see links
You must be registered for see links
You must be registered for see links
You must be registered for see links
You must be registered for see links
You must be registered for see links
You must be registered for see links
You must be registered for see links
Шаг 10: светодиодная матрица 3/4: код для Arduino






Итоговый код – смесь следующих кодов (и их модификация):
- Пример BLE_Write из библиотеки BLE ESP32 ARDUINO.
- Пример MatrixGF
 emo64 из библиотеки FastLED NeoMatrix.
emo64 из библиотеки FastLED NeoMatrix.
Подробно тут я распространяться о них не буду, просто рекомендую прочитать оригинальные программы, чтобы лучше понимать происходящее.
You must be registered for see links
Шаг 11: светодиодная матрица 4/4: испытания


Настало время всё проверить! После распознавания каждого жеста на светодиодную матрицу отправляется сигнал, и она показывает определённый узор. Видно, что на перчатке светодиоды зажигаются соответственно распознанному жесту.
Шаг 12: итоговые испытания и заключение


Вот как это выглядит вживую:
Я очень доволен получившимся устройством. Благодаря проекту я гораздо увереннее чувствую себя с tinyML и BLE. С тех пор я купил ещё Arduino Nano 33 IOT, и сейчас занимаюсь весьма интересным проектом, о котором напишу позже. Что бы я изменил во второй версии описанного мною устройства:
- Крышка для «перчатки». Сейчас она держится на корпусе только за счёт того, что туго надевается. Однако как-то во время поездки я задел что-то рукой, крышка соскочила и разбилась. В следующей версии прикручу её винтами.
- Корпус для светодиодной матрицы. Я почти сразу понял, что в моём корпусе отсутствует быстрый доступ к USB МИ. А мне хотелось бы иметь доступ, чтобы отлаживать код или менять его. Также без раскручивания корпуса нельзя зарядить внешний источник питания.
- Больше данных для обучения. Иногда некоторые из жестов не распознаются, а иногда распознаются ошибочно. Думаю, не хватает данных (всего 20 движений для каждого жеста). Больше движений – лучше модель, меньше ошибок.
На завершение проекта и написание этого текста у меня ушло несколько месяцев. Если что-то неясно, или какого-то файла не хватает, пишите в
You must be registered for see links
.